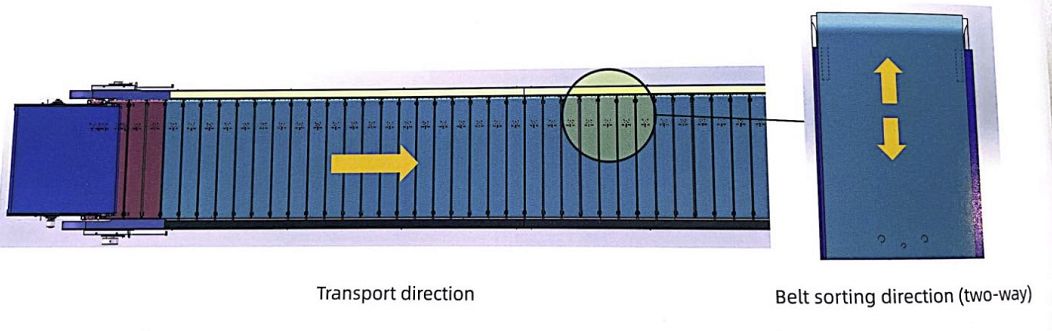
Linear cross belt sorter ကို ပါဆယ်ထုပ်များသယ်ဆောင်သော ခါးပတ်သယ်ဆောင်သောပစ္စည်းများကို မောင်းနှင်ရန်အတွက် ကွင်းဆက်တစ်ခုမှတဆင့် မော်တာဖြင့် မောင်းနှင်သည်။စကင်န်ဖတ်စနစ်သည် ချွဲနှင့် အရွယ်အစား အချက်အလက်ကို ရယူပြီးနောက်၊ပါဆယ်ထုပ်များကို ချုံးထဲသို့ ပို့ဆောင်ရန်နှင့် ပါဆယ်ထုပ်များ စီခြင်း၏ ရည်ရွယ်ချက်ကို အောင်မြင်စေရန်အတွက် PLC မှ တွန်းလှည်းများ၏ ခါးပတ်များကို စီခြင်း ဦးတည်ရာသို့ ရွေ့လျားစေရန် PLC မှ တောင်းဆိုချက်များမှတစ်ဆင့် လမ်းကြောင်းလွှဲသည့် ယန္တရားအား အစပျိုးပေးပါသည်။
| ကုသိုလ်ကံ | ကန့်သတ်ချက်များ | ||
| မော်တော်ပါဝါ | 11kw (30-40m) | 15kw (40-50m) | 18.5kw (50-60m) |
| အကျယ်ကို ပို့ဆောင်ခြင်း။ | 1000mm | ||
| ပို့ဆောင်မှုအရှိန် | 1.5m/s | ||
| အလယ်ဗဟိုအကွာအဝေး | 2200mm | ||
| အများဆုံး စီခြင်းထိရောက်မှု | 6000PPH (ပါဆယ်အရှည် 800 မီလီမီတာ) | ||
| အများဆုံးအမျိုးအစားခွဲခြင်းအရွယ်အစား | 1600X1000(LXW) | ||
| အများဆုံးအလေးချိန် အမျိုးအစားခွဲခြင်း။ | 60 ကီလိုဂရမ် | ||
| ချွင်းချက်အကျယ် | 2400-2500mm | ||
| ပါဆယ်ထုပ်များကြားတွင် အနည်းဆုံးအကွာ | 300mm | ||
| ကယ်ရီယာစေး | 15.24mm | ||
| ခါးပတ်အကျယ် | 140mm | ||
| ထောင့်ပြောင်းခြင်း။ | 1000mm အကျယ် 25ဒီဂရီ၊ 1200mm အကျယ် 32ဒီဂရီ | ||
| ဆိုလီနွိုက်အဆို့ရှင် | |||
| ကုသိုလ်ကံ | ကန့်သတ်ချက်များ | |||
| မော်တော်ပါဝါ | 9kw (30-40m) | 11kw (40-50m) | 15kw (50-60m) | 18.5kw (60-100m) |
| ပို့ဆောင်မှုအရှိန် | 2-2.2m/s | |||
| Min Chutes အကျယ် | 1000mm | |||
| အများဆုံး စီခြင်းထိရောက်မှု | 8500PPH (ပါဆယ်အရှည် 400 မီလီမီတာ) | |||
| လျှပ်စစ်ဒရမ်မော်တာပါဝါ | 300W | |||
| အလေးချိန်ကို ဆွဲတင်ခြင်း။ | 60 ကီလိုဂရမ်/မီတာ | |||
| ချွင်းချက်အကျယ် | 2400-2500mm | |||
| ကယ်ရီယာစေး | 15.24mm | |||
| ခါးပတ်အကျယ် | 126mm | |||
လျှောက်လွှာ
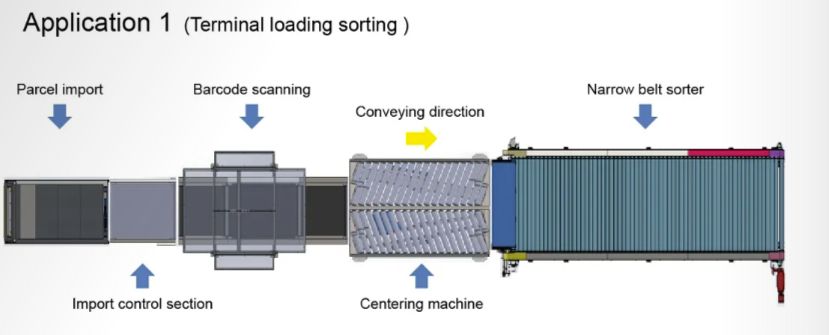
Terminal loading sorting
1. ပါဆယ်ထုပ်များကို telescopic belt conveyor သို့မဟုတ် line စီရန် အခြားနည်းလမ်းများဖြင့် တင်သွင်းခဲ့ပါသည်။
2. ပါဆယ်ထုပ်များကို ပါကင်အကွာအဝေးနှင့် ဘားကုဒ်ဇယားကွက်အချက်အလက်နှင့် အတိုင်းအတာအချက်အလက်များကိုဖတ်ရှုပြီးနောက် ပါဆယ်အကွာအဝေးကိုရရှိရန် တင်သွင်းမှုထိန်းချုပ်မှုအပိုင်းမှ ထိန်းချုပ်ထားသည်။
3. ကျဉ်းမြောင်းသော ခါးပတ်အမျိုးအစားကို ဗဟိုပြုသည့်စက်မှတစ်ဆင့် သတ်မှတ်ဇယားကွက်သို့ ရောက်ရှိလာပြီးနောက် သတ်မှတ်ထားသော ဇယားကွက်သို့ ကျဉ်းမြောင်းသော အမျိုးအစားအလိုက် အမျိုးအစားခွဲပါ။
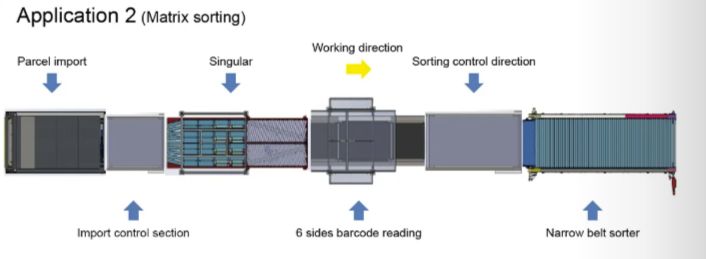
Matrix အမျိုးအစားခွဲခြင်း။
1. ပါဆယ်ထုပ်များကို telescopic belt conveyor သို့မဟုတ် line စီရန် အခြားနည်းလမ်းများဖြင့် တင်သွင်းခဲ့ပါသည်။
2. ပါဆယ်ထုပ်များကို အနည်းကိန်းစနစ်ဖတ်ပြီးနောက်နှင့် ဘားကုဒ်ဂရစ်အချက်အလက်နှင့် အတိုင်းအတာအချက်အလက်များကို ဖတ်ပြီးနောက် ပေးပို့သည့် အပိုင်းအစများဖြစ်သည်။
3. ကျဉ်းမြောင်းသော ခါးပတ်အမျိုးအစားခွဲခြင်း ပါဆယ်ထုပ်များကို ထိန်းချုပ်မှုအပိုင်းပြီးနောက် သတ်မှတ်ထားသော ဇယားကွက်သို့ အမျိုးအစားခွဲပါ။
စနစ်လည်ပတ်စီးဆင်းမှု
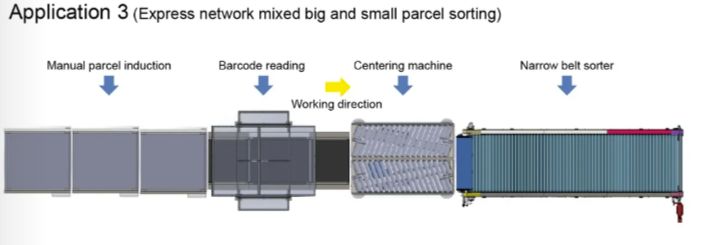
1. ပါဆယ်ထုပ်များကို induction belt ပေါ်တွင် ကိုယ်တိုင်ထည့်သွင်းပြီး ပါဆယ်ထုပ်တစ်ခုစီကို ထိန်းချုပ်နိုင်ရန် ပါဆယ်ထုပ်တစ်ခုစီကို ခါးပတ်တစ်ခုစီတွင်သာ ခွင့်ပြုပါ။
2. ပါဆယ်စည်းနှင့် အတိုင်းအတာ အချက်အလက်ကို ဘားကုဒ်ဖတ်ခြင်းမှ ဖတ်ကြားခဲ့သည်။
3. စီထားသော ပါဆယ်ထုပ်များသည် စက်ကို ဗဟိုပြုပြီးနောက် သတ်မှတ်ထားသော ခါးပတ်သို့ ကျဆင်းသွားသည်။
On-site Cases များ